
No products in the cart.


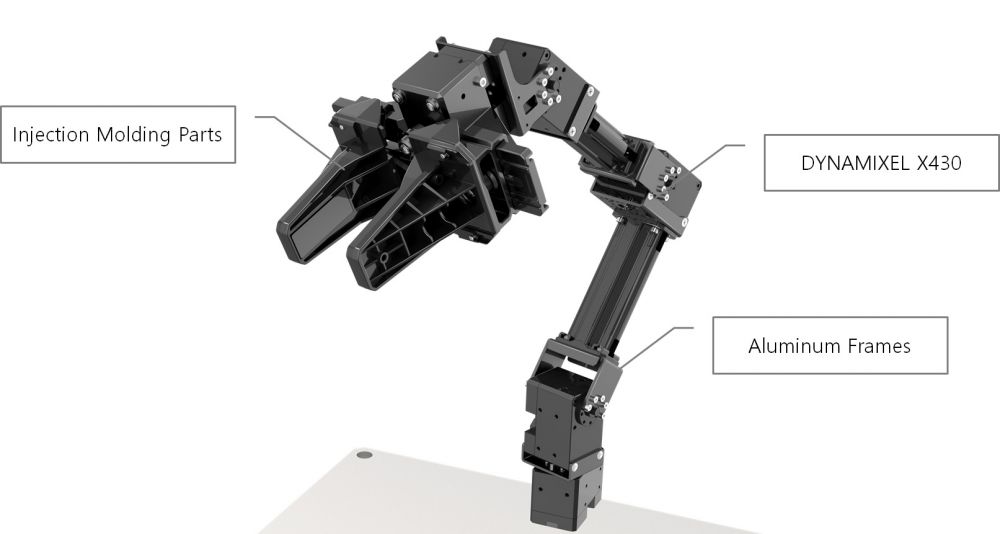
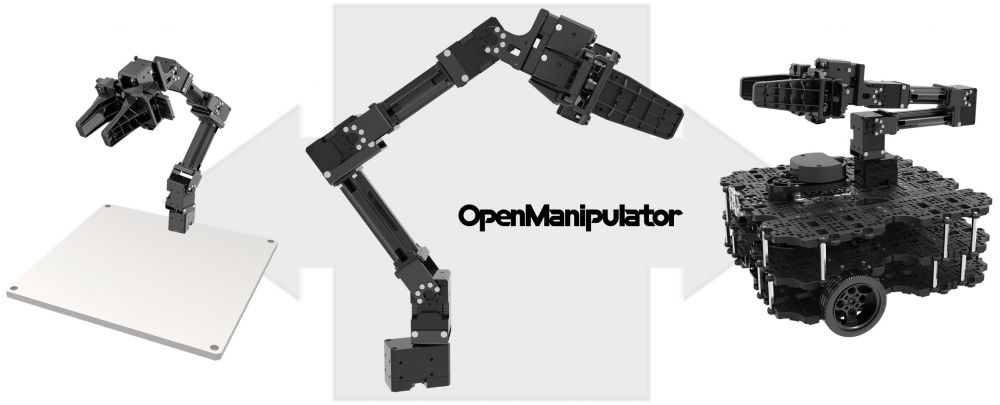
This product is a compact version of OpenManipulator based on ROS.
It has a high payload as DYNAMIXEL XM-430 model is applied.
Easy to use with PC or mobile platform such as TB3 Waffle Pi.
Provides source code and development environment which helps you immediately operate it with TB3 Waffle Pi
You can freely select and use either PC or Controller e.g. OpenCR.
Provides a variety of open source software as well as 3D drawings and CAD data for research and development.
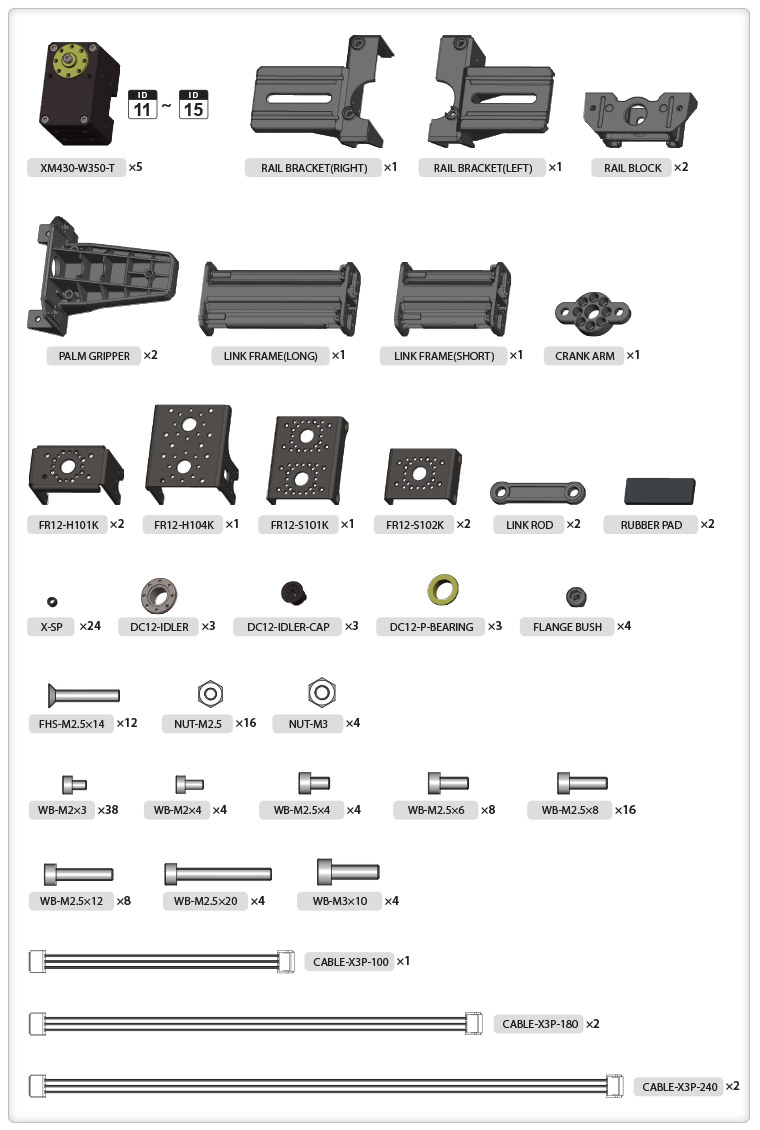
| XM430-W350-T | 5 |
|---|---|
| Exclusive Plastic Frame Set | 1 |
| FR12-H101K | 2 |
| FR12-H104K | 1 |
| FR12-S101K | 1 |
| FR12-S102K | 2 |
| HN12-I101 Set | 3 |
| HN11-I101 Set (spare) | 3 |
| Robot Cable Set X3P (by length) | 5 |
| Bolt & Nut Set | 1 |
| Rubber Pad (Finger Tip) | 2 types x 2 |
| Phillips Screwdriver | 1 |
| Allen Wrench (by type) | 3 |
| DYNAMIXEL | XM430-W350-T |
|---|---|
| Power Supply (sold separately) | 12V |
| Freedom of degree | 5 (4DOF + 1DOF Gripper) |
| Payload | 500g |
| RPM (joint) | 46RPM |
| Weight (assembly) | 700g |
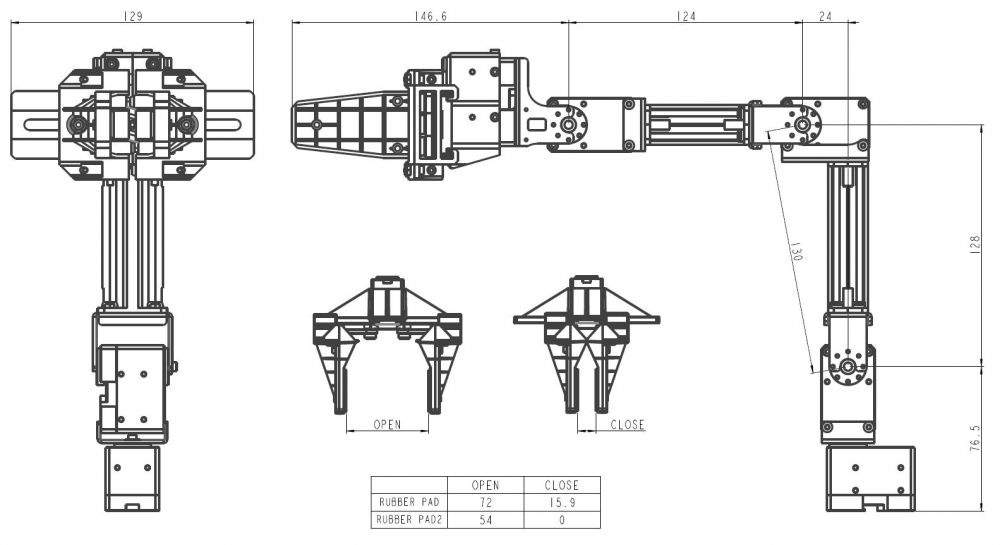
| Length | 380mm |
| Gripper stroke | 20~75mm |
| Interface | TTL Level Multi Drop BUS |
| Software | ROS. DYNAMIXEL SDK, Arduino, Processing |
| Controller (sold separately) | PC, OpenCR |
| Power Supply | SMPS 12V 5A |
|---|---|
| Controller | OpenCR or PC |
| Interface | U2D2 |
| Etc. | Base Plate-02 |
DYNAMIXEL, power supply, and controller are not included.
Please purchase separately.
Compatible with TB3 controller and power.
The assembly Manuel is not included, but you can download the pdf file on online for free. (Refer to below link)
The necessary idler set (HN11-I101 Set) is included in case you would like to use DYNAMIXEL XL430 as a hinge.
(* Need to purchase DYNAMIXEL XL430 separately)