
No products in the cart.





CODICE MEPA: R3D-MARRHUM
MARRtina - il primo social robot italiano Marrtina è un robot in grado di comunicare con le persone e di mostrare comportamenti sociali, è in grado di individuare le persone intorno a lei e di eseguire interazioni sociali attraverso la voce, le espressioni facciali e il movimento del corpo. Adatto per scuole/università in ambito educativo, può anche essere utilizzato come presentatore ed intrattenitore nei locali, può dare informazioni nei grandi centri commerciali e molto altro. Questo grazie all'esecuzione di semplici programmi, combinando le funzionalità di base e avanzate presenti nel robot. Basta un semplice browser e un po' di conoscenza del linguaggio Python. Spero di incontrarvi presto in qualche luogo pubblico: scuola, università, ristoranti, ospedali, centro commerciali... Aspetto un vostro invito e verrò trovarvi molto volentieri !!! #socialrobot #marrtino #marrtino #roboticaeducativa #robotica
MARRtino is a ROS-based low-cost differential drive robot platform that comes in many shapes.
MARRtino has been designed to be easy-to-build and easy-to-program, but at the same time it uses professional software based on ROS. It is thus suitable to implement and experiment many typical Robotics and Artificial Intelligence tasks, such as smart navigation, spoken human-robot interaction, image analysis, etc.
MARRtino is being successfully used in a variety of educational activities, ranging from pre-school children to PhD and PostDoc in Artificial Intelligence and Robotics.
You can develop your own robot in five steps:
1-Acquire the hardware - Part list
2-Assemble the robot - Build
3-Install the robot - Software
Requires:
Installation instructions:
For additional instructions check also here (currently only in Italian).
Raspberry Pi 3 image files (for Model B and Model B+)
4-Setup the robot Quick Setup
5-Program the robot- Several level of languages 4 in 1 - Programming

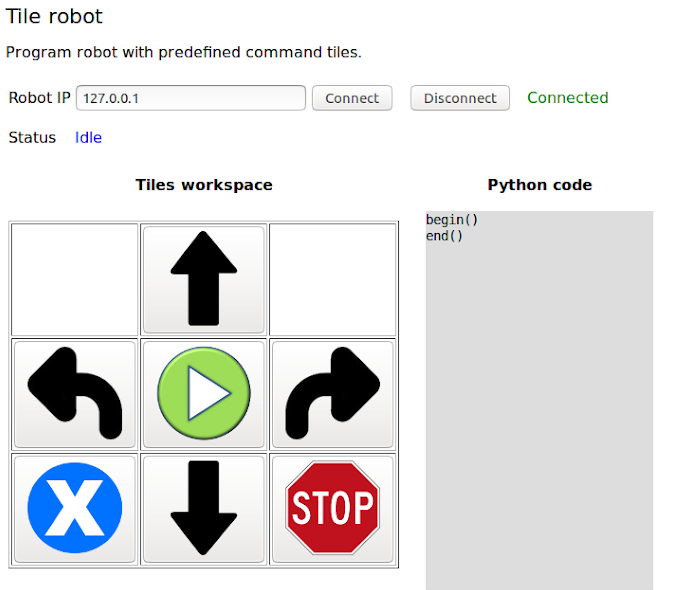
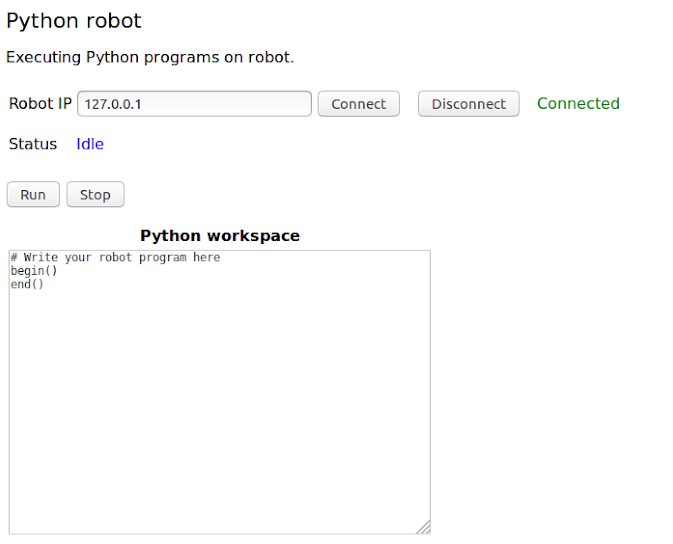
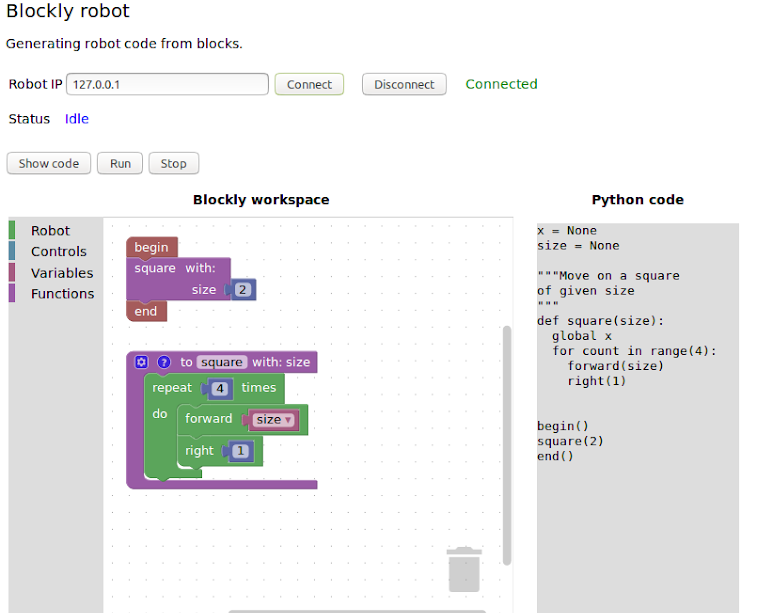
If you want to try MARRtino functionalities in a simulator, you can install the software (Step 3) and program the robot (Step 5) using the simulation mode.
Below some video example on how to setup and first programming
Is a working progress project
2019
_1.jpg)
19-2-2020 OPEN DIAG UNIVERSITY OF LA SAPIENZA
.jpeg)