







No products in the cart.




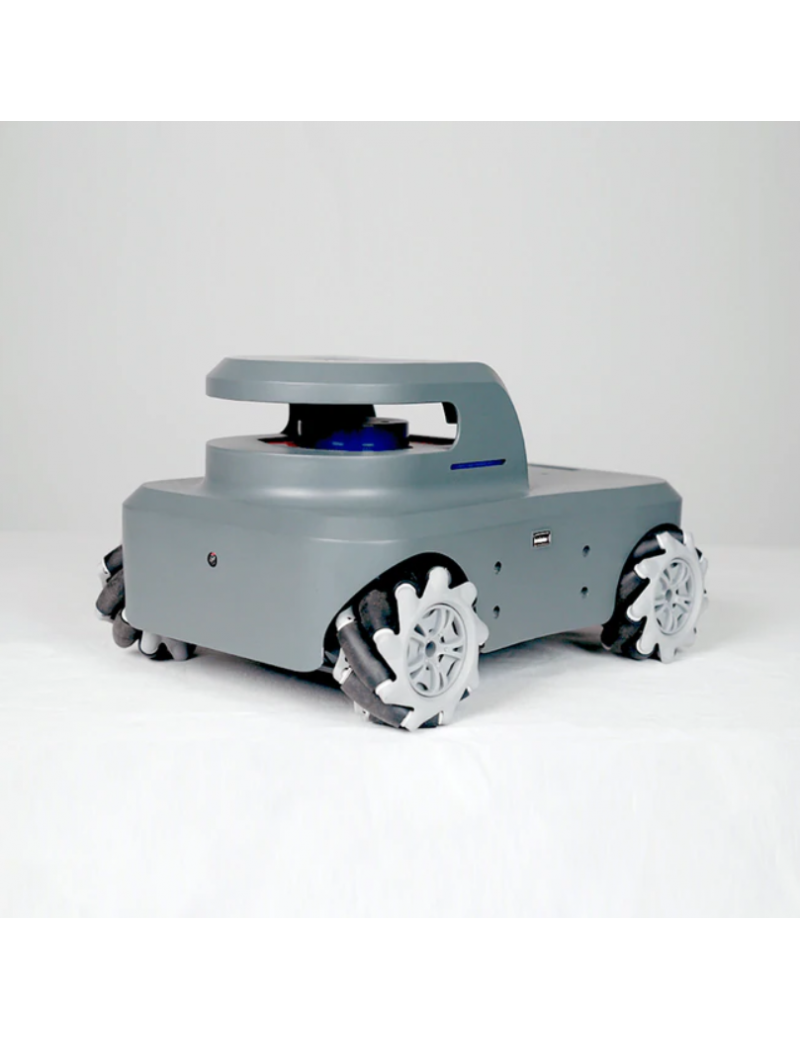
myAGV is jointly developed by Elephant Robotics and Huawei and produced independently. The manipulator uses mycobot and loads camera Eye-in-Hand design. myAGV adopts Mecanum wheel + lidar + high-precision camera. Control mode: autonomous navigation, handle control, keyboard control, etc.
Four mecanum wheels, full package design

Real-time movement and mapping; Autonomous navigation

It can identify and accurately locate objects
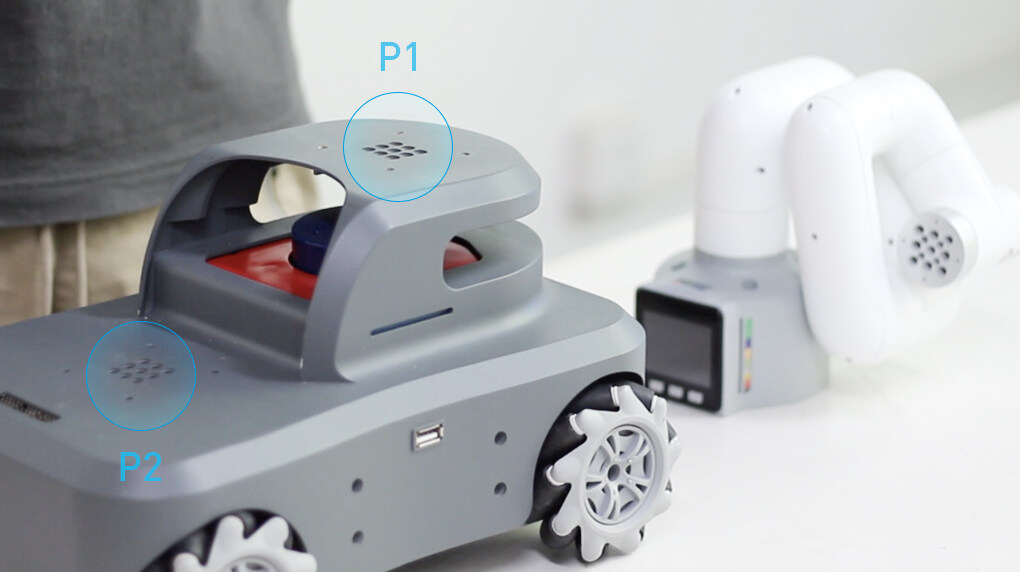
It can carry up to 2 mycobot robot arms and equip with end-effectors

myCobot can accurately locate and calibrate the camera and capture it in a large range
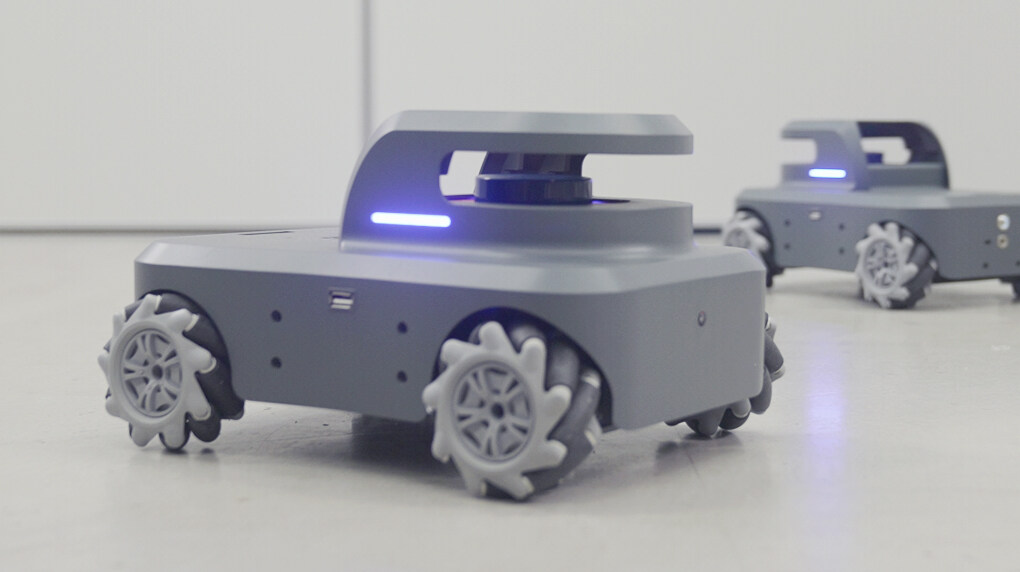
Multiple machines can cooperate, multiple control modes and multiple robots move in real-time
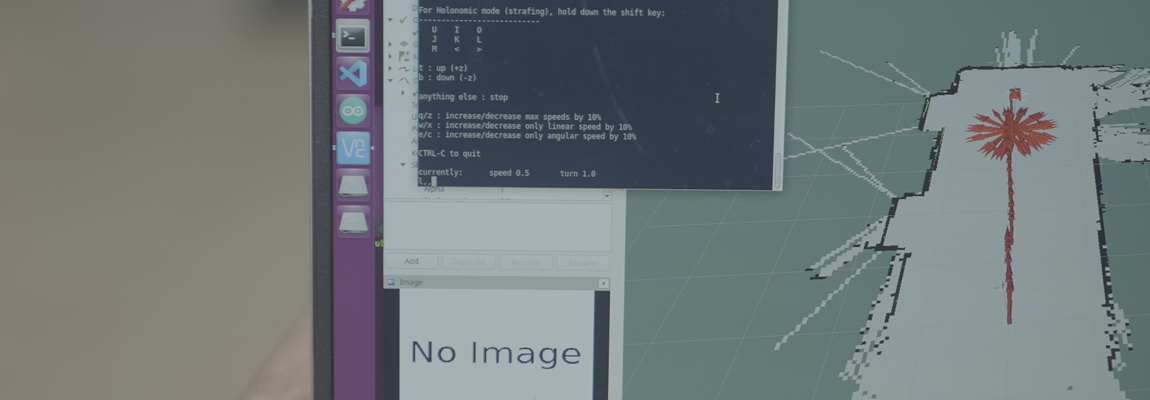
Support ROS simulation and moveit all open source; At the same time, there are rich interfaces: Raspberry pi, Arduino, Python, C + +
| Basic parameters | |
|---|---|
| Model | myAGV |
| Size | 300x205x145mm |
| Weight | 3.02kg |
| Wheel | Mecanum wheel |
| Motor | Hall encoder motor |
| Max. speed of motor | 220 rpm/min |
| Basic parameters | |
|---|---|
| Moving speed | 0.9m/s |
| Lidar | 360 ° omnidirectional radar |
| Identification range | 8m |
| Built-in controller | Raspberry pi 4B |
| Built-in camera | 5M pixels |
| Charging voltage | 24V 1A |
