








No products in the cart.


MarrtinoX COMPETITION AN OPEN SOURCE, OPEN HARDWARE ROBOTIC PLATFORM
A mobile robot to learn and discover
PER ACQUISTI DIRETTI DI SCUOLE E UNIVERSITA' PER LA COMPETIZIONE IL PREZZO VERRA' SCONTATO DEL 40% QUINDI VA RICHIESTA LA QUOTAZIONE A COMMERCIALE@BEDURIN.COM
MARRtino is a ROS-based low-cost differential drive robot platform that comes in many shapes.
MARRtino has been designed to be easy-to-build and easy-to-program, but at the same time it uses professional software based on ROS. It is thus suitable to implement and experiment many typical Robotics and Artificial Intelligence tasks, such as smart navigation, spoken human-robot interaction, image analysis, etc.
MARRtino is being successfully used in a variety of educational activities, ranging from pre-school children to PhD and PostDoc in Artificial Intelligence and Robotics.
You can develop your own robot in five steps:
1-Acquire the hardware - Part list
2-Assemble the robot - Build
3-Install the robot - Software
Requires:
Installation instructions:
For additional instructions check also here (currently only in Italian).
Raspberry Pi 3 image files (for Model B and Model B+)
4-Setup the robot Quick Setup
5-Program the robot- Several level of languages 4 in 1 - Programming

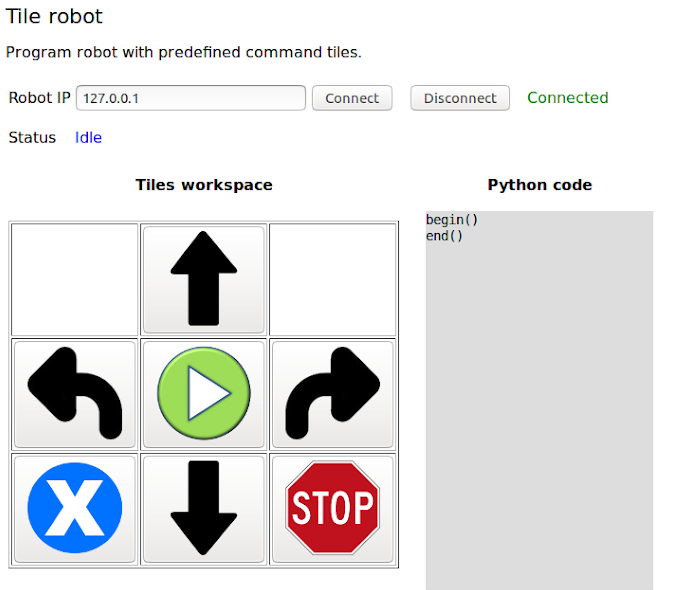
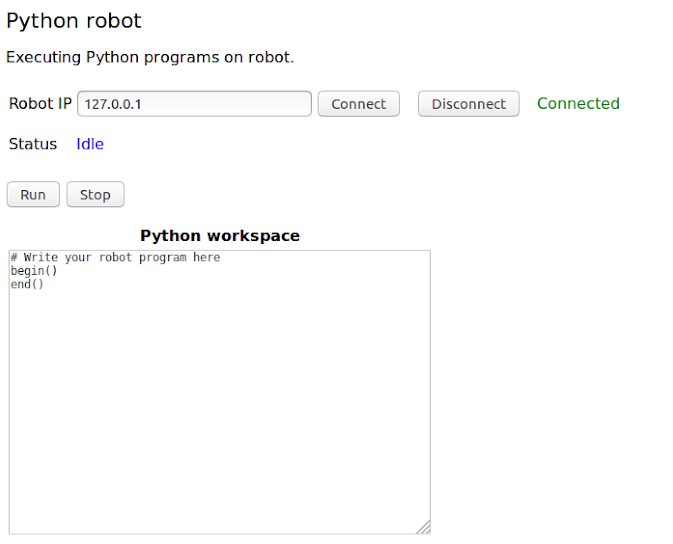
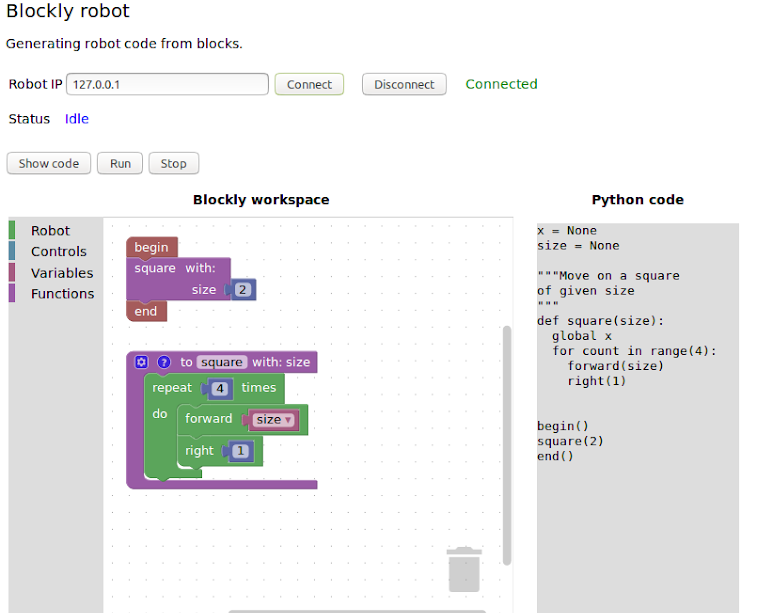
If you want to try MARRtino functionalities in a simulator, you can install the software (Step 3) and program the robot (Step 5) using the simulation mode.
Below some video example on how to setup and first programming
PART LIST
Control Board Mega2560 R3 ATmega2560
Raspberry PI with case, SD and cable
Motor Board Arduino Motor Shield R3
Motors Pololu 2825 70:1
Motor brackets Pololu
L-Bracket Pair Wheels Pololu 3281
Scooter wheel 144mm AND Caster wheel
Wheel hub Aluminium adapter
12 V battery and Battery charger USB 2.0
cable MA/MB Wires and screws Power Switch Voltage reader
8 sensori ultrasuoni
Raspberry Pi & Case
SD Card
Laser cutted Parts
OPTIONAL FOR COMPETITION
ORRBEC ASTRA - DEPTH CAMERA
RPLIDAR A1M8 - 360 Degree Laser Scanner Development kit for mapping
MarrtinoX COMPETITION AN OPEN SOURCE, OPEN HARDWARE ROBOTIC PLATFORM
A mobile robot to learn and discover